-
1 Reaktionsvorgang
сущ.1) авиа. процесс реакции2) психол. ход реакции3) аэродин. процесс, происходящий в период реакции, реакция -
2 Reaktionsvorgang
-
3 Ablauf
сущ.1) общ. процесс изменения, спуск (воды, пруда), сток (воды, пруда), стартовая линия (конный спорт), ход (событий), прошествие, (тк.sg) истечение, течение, течение, (тк.sg) сток2) геол. ответвление, отток, процесс развития, развитие, развитие, отвод (воды), сток (воды), апофиза (жилы, дайки), ход (процесса)3) авиа. дренаж, снижение4) церк. чинопоследование5) спорт. линия старта, отправление, разгон (бегуна, принимающего эстафету), старт6) воен. отбытие, отправка, прохождение (колонны), ход (напр. боя), протекание (напр. ядерной реакции), выступление (при передвижении войск маршем), истечение (срока)7) тех. дождеприёмник, завершение, разматывание, сбег, скат крыши, сматывание, продвижение (напр. ленты), возврат (номеронабирателя)8) хим. погон, переточная трубка (ректификационной колонны)9) стр. выходящие (из очистного сооружения или с очистной станции) сточные воды, отлив, трап, отвод (напр. воды из резервуара), выпуск, сточные воды, скат (крыши)10) ж.д. (сточный) жёлоб, отцеп, роспуск (вагонов) с сортировочной горки, скатывание (отцепа)11) юр. осуществление, очередь, истечение (einer Frist), окончание (íàïð. einer Frist), процесс (письма), последовательность (событий), течение (событий)12) экон. исход, конец, последовательность (напр. операций), ход (напр. производственного процесса), окончание (напр. срока), окончание (срока)13) страх. истечение (страхования)14) авт. сбегающая часть профиля кулачка, стекание, сторона сбегания, сточное устройство (напр., жёлоб), срабатывание (реле)16) артил. истечение (жидкости)17) гидр. слив (устройство)18) горн. проведение (работ), ход (работы)19) дор. жёлоб, расход (жидкости)20) текст. износ, размотка, более светлая окраска близ опушки ткани (порок)21) электр. сбегающий край (щётки)22) выч. выполнение, прогон, прохождение23) нефт. переточная трубка, фракция, протекание (процесса), течение (реакции)24) пищ. оттёк, патока оттёк, течение (технологического) процесса, ход (технологического) процесса, спуск (жидкости), (технологический) процесс, сход, сток (жидкости), сток (отверстие)25) патент. истечение (времени, срока)26) бизн. окончание срока, истечение срока27) прогр. обработка28) пив. фильтрат, фильтрование (сусла)29) гидравл. выхлоп, выход30) арх. переход в виде дуги31) аэродин. взлёт, запуск, протекание, пуск, струя, отплытие (судна), дренажное отверстие, слив, спуск (на воду)33) судостр. завал борта, заострение, отплытие судна, плавность обводов, сгон, сточная вода, отход (судна)34) кинотех. продвижение (ленты, плёнки, фильма), развитие (действия кинофильма) -
4 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
5 kumulativer Prozeß
прил.бизн. кумулятивный процесс (процесс цепной реакции, в котором следствия процесса становятся причиной его дальнейшего усиления)6 Verlauf
m -(e)s,..läufe1) течение, ход ( событий); ход, протекание (напр., химической реакции)zeitlicher Verlauf — изменение( протекание) во времениVerlauf der Erörterungen — ход обсуждения (чего-л.)Verlauf der Kampfhandlungen — ход ( течение, динамика) боевых действийVerlauf der Wellenbewegung — процесс распространения волнVerlauf der Witterung — метеор. ход погодыdie Sache nahm einen guten Verlauf — дело приняло хороший оборотnach Verlauf mehrerer Stunden — через ( спустя, по истечении) нескольких часов2) линия, направление (напр., границы)Verlauf der Küsten — очертания береговVerlauf der Stellung — воен. начертание позиции7 Verlauf
сущ.1) общ. направление (границы и т. п.), ход (событий), протекание (химической реакции и т. п.), линия, течение2) комп. журнал (Internet Explorer History)3) геол. диаграмма, конфигурация, очертания, прохождение, режим, эпюра, отклонение (скважины)4) авиа. изменение (напр. по времени), протекание (процесса)5) мед. протекание заболевания6) воен. начертание7) тех. вид, путь, форма, характер, ход (кривой)8) экон. процесс9) фин. истечение10) астр. ход (напр. кривой)11) горн. ход (процесса)12) полигр. плавный переход тонов, постепенное ослабление тонов к краям изображения, роспуск13) радио. форма (кривой), характеристика (процесса), ход (кривой)14) текст. розлив (о краске, лаке)15) электр. характеристика, кривая16) свар. закон изменения, характер изменения (процесса)17) микроэл. траектория18) автом. характер кривой (на диаграмме)19) дер. движение, расплывание, расположение, растекание, розлив (краски)20) аэродин. течение (процесса)21) судостр. распределение (напр. крутящего момента)8 Hackschnitzel-Zwangstränkung
принудительная пропитка щепы
пропитка щепы
Процесс, обеспечивающий проникновение химикатов внутрь щепы с целью обеспечения равномерности прохождения реакции во всем объеме щепы.
[ ГОСТ 17401-80]Тематики
Синонимы
EN
DE
FR
Немецко-русский словарь нормативно-технической терминологии > Hackschnitzel-Zwangstränkung
9 Schweißen
сварка
Получение неразъемных соединений посредством установления межатомных связей между соединяемыми частями при их нагревании и (или) пластическом деформировании
[ ГОСТ 2601-84]
сварка
Процесс получения неразъёмных соединений посредством установления межатомных связей между свариваемыми частями при их местном или общем нагреве или пластическом деформировании, а также при совместном действии того и другого
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
- сварка, резка, пайка
- технологические процессы в целом
EN
DE
FR
термитная сварка
Сварка, при которой для нагрева используется энергия горения термитной смеси
[ ГОСТ 2601-84]
термитная сварка
Сварка заливкой жидкого металла между свариваемыми кромками, при которой используют энергию экзотермической реакции смеси оксидов металла и измельченного алюминиевого порошка, в результате чего образуется расплавленный присадочный металл (см. рисунок 35).
Примечание - Допускается использовать предварительный разогрев. В некоторых случаях применяют давление.
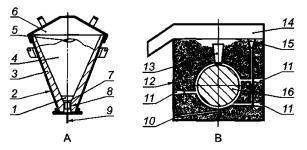
1 - заглушка; 2 - корпус тигля; 3 - огнеупорная футеровка; 4 - термит; 5 - термитная спичка; 6 - крышка тигля; 7 - термоизоляция; 8 - стакан; 9 - запорный гвоздь; 10 - сток модельного материала; 11 - отверстие для предварительного подогрева; 12 - литейная форма; 13 - прибыль; 14 - желоб для шлака; 15 - литник; 16 - заготовка
А - тигель, В - сечение формы
Рисунок 35 - Термитная сварка
[ ГОСТ Р ИСО 857-1-2009]Тематики
- сварка, резка, пайка
EN
DE
FR
Немецко-русский словарь нормативно-технической терминологии > Schweißen
См. также в других словарях:
Процесс Фишера — Тропша — Процесс Фишера – Тропша это химическая реакция, происходящая в присутствии катализатора, в которой монооксид углерода (CO) и водород H2 преобразуются в различные жидкие углеводороды. Обычно используются катализаторы, содержащие железо и… … Википедия
Процесс Фишера — Тропа — Процесс Фишера Тропша это химическая реакция, происходящая в присутствии катализатора, в которой монооксид углерода (CO) и водород H2 преобразуются в различные жидкие углеводороды. Обычно используются катализаторы, содержащие железо и кобальт.… … Википедия
Реакции замещения — (англ. substitution reaction) химические реакции, в которых одни функциональные группы, входящие в состав химического соединения, меняются на другие группы. Реакции замещения обозначают английской буквой «S». Общий вид реакций… … Википедия
Реакции нуклеофильного присоединения — (англ. addition nucleophilic reaction) реакции присоединения, в которых атаку на начальной стадии осуществляет нуклеофил частица, заряженная отрицательно или имеющая свободную электронную пару. На конечной стадии образующийся… … Википедия
Реакции электрофильного присоединения — (англ. addition electrophilic reaction) реакции присоединения, в которых атаку на начальной стадии осуществляет электрофил частица, заряженная положительно или имеющая дефицит электронов. На конечной стадии образующийся… … Википедия
РЕАКЦИИ — (1) связей силы воздействия тел на точки механической системы, в которых стесняется свобода её движения. Р. связей возникают (согласно закону Ньютона) как пассивные силы противодействия при наличии активных сил, действующих на механические связи… … Большая политехническая энциклопедия
ПРОЦЕСС ХАБЕРА — ПРОЦЕСС ХАБЕРА, промышленный процесс (изобретен Фрицем ХАБЕРОМ и Карлом БОШЕМ), в котором атмосферный азот «связывается» путем синтеза аммиака. Смесь азота и водорода пропускается через нагретый катализатор под давлением около 1000 атмосфер. При… … Научно-технический энциклопедический словарь
процесс восстановления углерода из диоксида углерода — Процесс восстановления углерода из диоксида углерода, образовавшегося при взаимодействии расплава активной зоны с бетоном шахты ядерного реактора, в результате реакции с металлами [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.]… … Справочник технического переводчика
РЕАКЦИИ, ФОРМИРОВАНИЕ — Процесс, в результате которого неприемлемые чувства или импульсы управляются установлением прямо противоположных им паттернов поведения. Согласно классической психоаналитической теории, формирование реакции осуществляется путем подавления… … Толковый словарь по психологии
Процесс Фишера — Для улучшения этой статьи желательно?: Проставив сноски, внести более точные указания на источники. Процесс Фишера – Тропша это … Википедия
Процесс кислородного сгорания — Ядерные процессы Радиоактивный распад Альфа распад Бета распад Кластерный распад Двойной бета распад Электронный захват Двойной электронный захват Гамма излучение Внутренняя конверсия Изомерный переход Нейтронный распад Позитронный распад… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.